




 Найти эксперта
Найти эксперта



Человек с древних времён хотел использовать силы природы и её объекты в своих целях, управлять ими. Так, в середине $XX$ века ученые поняли, что управление силами природы и окружающим миром неразрывно связано с информационными процессами в обществе. В $1948$ году появилась книга американского математика Норберта Винера «Кибернетика, или Управление и связь в животном и машине», с которой началось развитие новой науки – кибернетики.
Рисунок 1. Норберт Винер
Кибернетика (в переводе с греческого – кормчий, рулевой) – это наука, изучающая общие закономерности процессов управления и передачи информации в машинах, живых организмах и обществе.
Основная идея, изложенная в книге Винера заключалась в том, что управление в любых системах – биологических, технических, общественных – определяется одними и теми же информационными законами и тесно связано с обменом информацией.
Система ( в переводе с греческого- составленный) – это группа объектов и связей между ними, выделенных из среды и рассматриваемых как одно целое.
Рисунок 2. Система
Системный подход состоит в том, что объект исследования рассматривается как система с учетом всех взаимосвязей между её частями.
Системы различают:
- естественные (природные);
- искусственные (созданные людьми).
Любая искусственная система создается с определённой целью. Объекты системы называются компонентами. Связи между частями предают системе особые свойства, которых нет ни у одного отдельного компонента системы. Свойства системы нельзя определить суммой свойств её компонентов. Если в компоненте системы выделяются отдельные части и существуют связи между ними, то этот компонент называется подсистемой (системой более низкого уровня). Часто каждая система имеет надсистему (систему более высокого уровня).
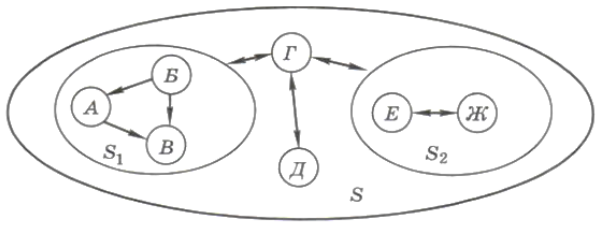
Рисунок 3. Пример систем
Система $S$ состоит из двух подсистем $S_1$ и $S_2$, а также элементов Г и Д.
Системы бывают замкнутые и разомкнутые.
Разомкнутые системы просты в обращении, в них поток информации идет только в одну сторону. Примером может служить светофор или табло. Недостатком разомкнутых систем является то, что регулятор должен знать точную модель самого объекта, что на практике чаще всего неизвестно, и что такие системы подвержены внешним воздействиям о которых у него нет никакой информации. Проблема решается добавлением канала обратной связи. Системы с обратной связью называют замкнутыми системами или системами с цикличной подачей информации.
Системы с обратной связью широко используются в технике. Примерами служат автопилоты на судах и самолётах, регуляторы частот вращения турбин или двигателей, роботы с датчиками обратной связи (камеры, различные температурные датчики…).
Примером обратной связи в обществе может служить жалобы граждан на работу органов управления. Для чего существуют специализированные сайты и приемные или контактные телефоны приемных комиссий.
Обратная связь может быть положительной и отрицательной. Положительная связь, когда регулятор сам стремится увеличить разницу между заданным значением и сигналом обратной связи. Зачастую в этом случае система переходит в колебательный режим, что используется в генераторах колебаний. Другим примером положительной обратной связи служат цепные химические или физические реакции (горение, взрывы, ядерная реакция).
Обратная связь, при которой регулятор уменьшает или стремиться уменьшить разницу между фактическим состоянием самого объекта и заданной целью, называется отрицательной.
Системный подход ознаменовал появление нового научного направления – системного анализа. В задачи которого входит изучение сложных систем ( биологических, технических, экономических, социальных) на основе управления и теории информации.
Во многих системах взаимодействие между подсистемами можно рассматривать как управление. Такие системы (их называют системами управления) всегда содержат управляющий объект (регулятор) и управляемый объект. Итог управления или цель чаще всего задается извне и регулятор процесса управления является только исполнителем. Например, водитель служебной машины исполняет указания своего начальника и никогда не решает сам, куда ехать.
Системы управления делятся на автоматические и автоматизированные. Автоматические системы работают без участия человека, например автопилот, а автоматизированные системы работают под управлением человека, а всю информацию собирает и обрабатывает компьютер.
Многие системы умеют «подстраиваться» под изменения внешних условий или изменение свойств объекта управления. Такие системы называются адаптивными. Классическая адаптивная система – глаз человека, который изменяет диаметр зрачка в зависимости от освещённости. В технических системах адаптивные регуляторы могут управлять объектом, модель которого плохо известна или меняется. Они параллельно решают две задачи – управляют и уточняют имеющуюся модель, что, в свою очередь, позволяет улучшить управление.
Найти эксперта


