




 Найти эксперта
Найти эксперта


Инерциальные системы отсчета
Система отсчета, движущаяся (относительно звезд) равномерно и прямолинейно (т. е. по инерции), называется инерциальной. Очевидно, что таких систем отсчета - неисчислимое множество, поскольку любая система, движущаяся относительно некоторой инерциальной системы отсчета равномерно и прямолинейно, тоже инерциальна.
Опыт показывает, что во всех инерциальных системах отсчета все механические процессы протекают совершенно одинаково (при одинаковых условиях).
Это положение, названное механическим принципом относительности (или принципом относительности Галилея), было сформулировано в $1636$ г. Галилеем. Галилей пояснял его на примере механических процессов, совершающихся в каюте корабля, плывущего равномерно и прямолинейно по спокойному морю. Для наблюдателя, находящегося в каюте колебание маятника, падение тел и другие механические процессы протекают точно так же, как и на неподвижном корабле. Поэтому, наблюдая эти процессы, невозможно установить ни величину скорости, ни даже сам факт движения корабля. Чтобы судить о движении корабля относительно какой-либо системы отсчета (например, поверхности воды), необходимо вести наблюдения и за этой системой (видеть, как удаляются предметы, лежащие на воде, и т. п.).
К началу $XX$ в. выяснилось, что не только механические, но и тепловые, электрические, оптические и все другие процессы и явления природы протекают совершенно одинаково во всех инерциальных системах отсчета. На этом основании Эйнштейн в $1905$ г. сформулировал обобщенный принцип относительности, названный впоследствии принципом относительности Эйнштейна: во всех инерциальных системах отсчета все физические процессы протекают совершенно одинаково (при одинаковых условиях).
Этот принцип наряду с положением о независимости скорости распространения света в вакууме от движения источника света лег в основу специальной теории относительности, разработанной Эйнштейном.
Законы движения тел в инерциальных системах отсчета
Простые наблюдения и опыты, например с тележками (рис. 1), приводят к следующим качественным заключениям:
- тело, на которое другие тела не действуют, сохраняет свою скорость неизменной;
- ускорение тела возникает под действием других тел, но зависит и от самого тела;
- действия тел друг на друга всегда носят характер взаимодействия.
Найти эксперта
Эти выводы подтверждаются при наблюдении явлений в природе, технике, космическом пространстве только в инерциальных системах отсчета.
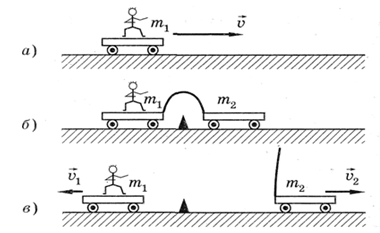
Рисунок 1.
Взаимодействия отличаются друг от друга и количественно, и качественно. Например, ясно, что чем больше деформируется пружина, тем больше взаимодействие ее витков. Или чем ближе два одноименных заряда, тем сильнее они будут притягиваться. В простейших случаях взаимодействия количественной характеристикой является сила. Сила --- причина ускорения тел (в инерциальной системе отсчета). Сила - это векторная физическая величина, являющаяся мерой ускорения, приобретаемого телами при взаимодействии. Сила характеризуется:
- модулем;
- точкой приложения;
- направлением.
Качественно по своим свойствам взаимодействия также различны. Например, электрическое и магнитное взаимодействия связаны с наличием зарядов у частиц либо с движением заряженных частиц. На основании обобщения огромного числа опытных фактов и наблюдений были сформулированы законы динамики. Такое обобщение было выполнено Исааком Ньютоном.
Первый закон Ньютона постулирует существование инерционных систем отсчета и дает признак, пользуясь которым такие системы можно выделить из всего разнообразия систем отсчета: существуют такие системы отсчета, относительно которых поступательно движущееся тело сохраняет свою скорость постоянной, если на него не действуют другие тела (или действия других тел компенсируются).
Второй закон Ньютона отражает фундаментальное свойство материального мира, в соответствии с которым относительно инерциальных систем отсчета ускорение тел возникает только под действием сил. Этот закон формулируется следующим образом: ускорение, с которым движется тело, прямо пропорционально равнодействующей всех сил, действующих на тело, обратно пропорционально его массе и направлено так же, как и равнодействующая сила.
Часто основной закон динамики записывают в виде $\overline{F}=m\overline{a}$, что дает универсальный способ определения любых сил на основе кинематических методов измерения ускорения.
Третий закон Ньютона является обобщением громадного количества опытных фактов, показывающих, что силы - результат взаимодействия тел. Он формулируется следующим образом: тела действуют друг на друга с силами, равными по модулю и противоположными по направлению.
Законы Ньютона и другие законы динамики, выполняются только в инерциальных системах отсчета. В неинерциальных системах отсчета эти законы, вообще говоря, уже несправедливы.
Человек везет двое связанных саней, прикладывая силу под углом $300$ к горизонту. Найдите эту силу, если известно, что сани движутся равномерно. Массы саней по $40$ кг. Коэффициент трения $0,3$.
Дано: $m=40$кг, $\mu =0,3$.
Найти: $F$-?
Решение: Выберем инерциальную систему отсчета, свяжем ее с мостом. Это позволит применить к описанию движения автомобиля законы Ньютона. Ускорение саней равно нулю, т.е. сани движутся равномерно. Так как мы принимаем, что веревка, связывающая сани, невесома и нерастяжима, то мы сразу рисуем одинаковые силы натяжения $T$, приложенные к саням от натянутой веревки.
Так как сани движутся с постоянной скоростью, то по первому закону Ньютона сумма сил, действующих на сани, равна нулю. Запишем первый закон Ньютона для каждого тела сразу в проекции на оси:
\[T-F_{mp1} =0\] \[N_{1} -mg=0\] \[F_{mp1} =\mu N_{1} \] \[F\cos \alpha -F_{mp2} -T=0\] \[N_{2} +F\sin \alpha -mg=0\] \[F_{mp2} =\mu N_{2} \]Решая полученную систему уравнений, получаем:
$F=\frac{2\mu mg}{\cos \alpha +\mu \sin \alpha } =240$Н.
Ответ: $240$ Н
Найти эксперта



