




 Найти эксперта
Найти эксперта


Скоростью в механике называется физическая величина, характеризующая зависимость перемещения тела от времени, в течение которого осуществлялось это перемещение. В наиболее упрощённой форме эта зависимость отражена в понятии средней скорости:
$$\overrightarrow{v}=\frac{\triangle \overrightarrow{s}}{\triangle t}=\frac{\triangle \overrightarrow{r}}{\triangle t}$$В физике наибольший интерес представляет не средняя, а мгновенная скорость, которая определяется как предел, к которому стремится средняя скорость на бесконечно малом промежутке времени $\Delta $t: $\overrightarrow{v}={\mathop{lim}_{\triangle t\to 0} \frac{\triangle \overrightarrow{s}}{\triangle t}\ }=\frac{d\overrightarrow{r}}{dt}=\dot{\overrightarrow{r}}$
Декартовых координатах это уравнение эквивалентно системе трёх уравнений:
где $v_x$, $v_y$,$\ v_z$ -- проекции вектора $\overrightarrow{v}$ на координатные оси. Модуль вектора $\overrightarrow{v}$:
Рисунок 1. Средняя и мгновенная скорости
Мгновенная скорость $\overrightarrow{v}$ тела в любой точке криволинейной траектории направлена по касательной к траектории в этой точке. Различие между средней и мгновенной скоростями показано на рис. 1.
При движении тела по криволинейной траектории его скорость $\overrightarrow{v}$ изменяется по модулю и направлению. Изменение вектора скорости $\overrightarrow{v}$ за некоторый малый промежуток времени $\Delta $t можно задать с помощью вектора $\triangle \overrightarrow{v}$ (рис. 2.)
Вектор изменения скорости $\triangle \overrightarrow{v}=\ \overrightarrow{v_2}-\ \overrightarrow{v_1}$ за малое время $\Delta $t можно разложить на две составляющие:
$\triangle \overrightarrow{v_{\tau }}$ , направленную вдоль вектора $\overrightarrow{v}$ (касательная составляющая), и $\triangle \overrightarrow{v_n}\ $, направленную перпендикулярно вектору $\overrightarrow{v}$ (нормальная составляющая).
Рисунок 2.
Изменение вектора скорости по величине и направлению: $\triangle \overrightarrow{v}=\ \overrightarrow{v_{\tau }}+\ \overrightarrow{v_n}$ -- изменение вектора скорости за время $\triangle t$
Единицей измерения скорости в системе СИ является метр в секунду: $\left[v\right]=м/c$
Движение точки в пространстве можно считать заданным, если известны законы изменнеия трех ее декартовых координат x, y, z как функции времени. Однако в некоторых случаях пространственного движения материальных точек (например, в областях, ограниченных поверхностями различной формы) использование уравнений движения в декартовых координатах неудобно, так как они становятся слишком громоздкими. В таких случаях можно выбрать другие три независимых скалярных параметра $q_1,q_2,\ q_3$, называемых криволинейными, или обобщенными координатами, которые также однозначно определяют положение точки в пространстве.
Скорость точки М при задании ее движения в криволинейных координатах определится в виде векторной суммы составляющих скоростей, параллельных координатным осям: $\overrightarrow{v}=\frac{d\overrightarrow{r}}{dt}=\frac{\partial \overrightarrow{r}}{\partial q_1}\dot{q_1}+\frac{\partial \overrightarrow{r}}{\partial q_2}\dot{q_2}+\frac{\partial \overrightarrow{r}}{\partial q_3}\dot{q_3}=v_{q_1}\overline{e_1}+v_{q_2}\overline{e_2}\ +v_{q_3}\overline{e_3}$
Проекции вектора скорости на соответствующие координатные оси равны:
Здесь $H_i=\left|{\left(\frac{\partial \overrightarrow{r}}{\partial q_i}\right)}_M\right|$ - параметр, который называется i-ым коэффициентом Ламе и равен значению модуля частной производной от радиус-вектора точки по i-ой криволинейной координате, вычисленной в данной точке М. Каждый из векторов $\overline{e_i}$ имеет направление, соответствующее направлению движения точки конца радиус-вектора $r_i$ при возрастании i-ой обобщенной координаты. Модуль скорости в ортогональной криволинейной системе координат можно рассчитать по зависимости:
В приведенных формулах значения производных и коэффициентов Ламе вычисляют для текущего положения точки М в пространстве.
Координатами точки в сферической системе координат являются скалярные параметры r, ${\mathbf \varphi },\ {\mathbf \theta }$, отсчитываемые так, как показано на рис. 3
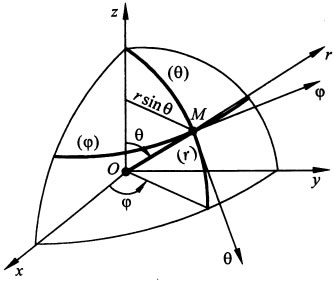
Рисунок 3. Вектор скорости в сферической системе координат
Система уравнений движения точки в данном случае имеет вид:
На рис.3 изображены радиус-вектор $r$, проведенный из начала координат, углы ${\mathbf \varphi }$ и ${\mathbf \theta }$, а также координатные линии и оси рассматриваемой системы в произвольной точке М траектории. Видно, что координатные линии $({\mathbf \varphi })$ и $({\mathbf \theta })$ лежат на поверхности сферы радиусом r. Данная криволинейная система координат также является ортогональной. Декартовы координаты могут быть выражены через сферические координаты так:
Тогда коэффициенты Ламе: $H_r=1;\ \ H_{\varphi }=rsin\varphi ;\ \ H_0=r$ ;
проекции скорости точки на оси сферической системы координат $v_r=\dot{r\ \ };\ \ v_{\varphi }=rsin\varphi ;\ \ v_{\theta }=r\theta \ \ $, а модуль вектора скорости $v=\sqrt{v^2_r+v^2_{\varphi }+v^2_{\theta }}=\sqrt{{\dot{r}}^2+r^2{\dot{\varphi }}^2+r^2{\dot{\theta }}^2}$
Найти эксперта



